The Vornado Flippi fan series gets a number of bad reviews associated with short lifetime, some claiming days or weeks, prompting a return of the fan to the retailer.
This Vornado Flippi V6 fan failed because a 120 Vac wire going from the fan base to the fan blade motor failed, possibly due to fatigue due to the oscillating motion of the fan head.
This blue wire luckily was the neutral wire, and was of type AWM 1430 with VW-1 rating, 22 AWG.
The wire manufacturer/model is Lee Yuen.
The Flippi oscillating fan had an excessive amount of grease inside–not what one would expect from Vornado.
The 120Vac wire is broken off inside the Vornado Flippi fan base.
The Simpowel V8 Bluetooth stereo speaker costs less than $40, has been around for over 3 years (updated in 2016 to Bluetooth 4.0) and despite not having aptX, has adequate quality and sufficiently loud audio.
Even in the stands of a baseball game, the Simpowel V8 is loud enough to hear the FM radio commentators for me and the person(s) sitting next to me, albeit set near maximum volume.
Key features of the Simpowel V8 Bluetooth speakers
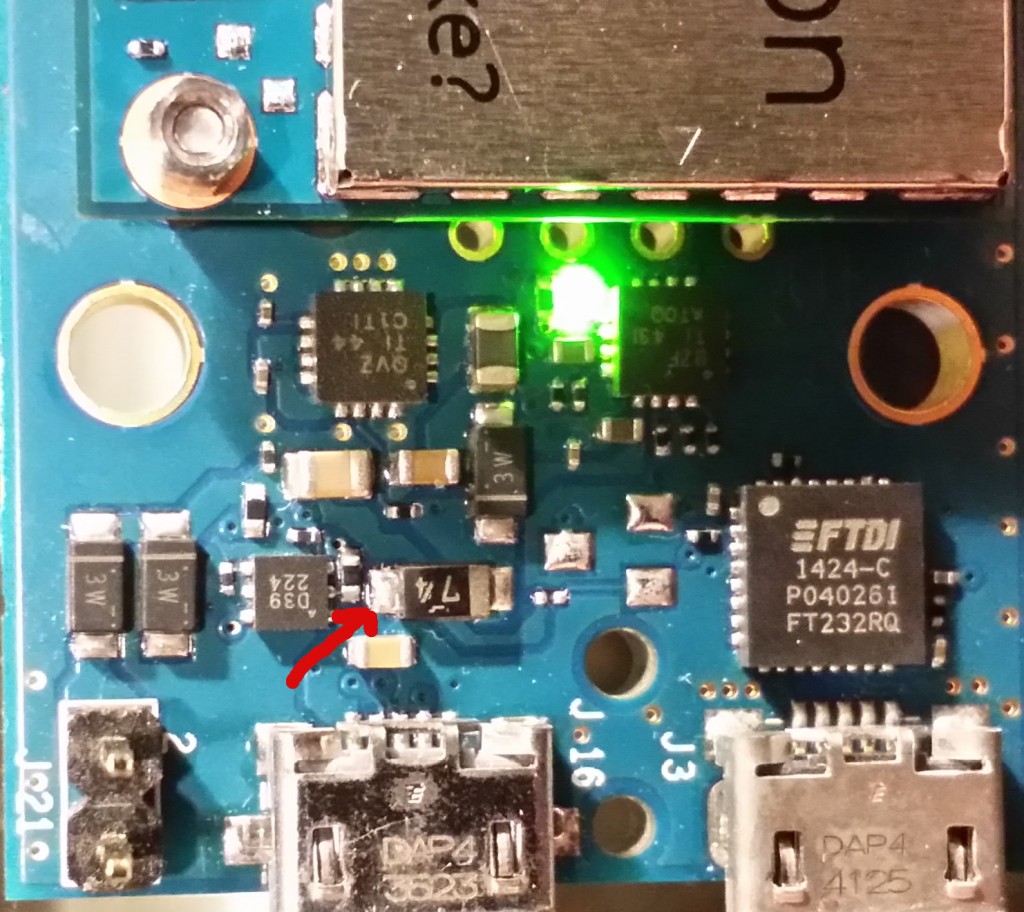
Both (two) green LEDs on the breakout board must be on and steady. If they are cycling on and off every several seconds, your USB port may not be providing enough power to J16. Maybe that USB cable is bad.
Alternatively, the Edison eMMC flash memory could be corrupted, which requires reflashing
On laptop, unplug and plugin both USB cables, then type
New USB device found, idVendor=8087, idProduct=0a99
FTDI USB Serial Device converter detected
Detected FT232RL
FTDI USB Serial Device converter now attached to ttyUSB0
If not, try being sure you are NOT plugged into a USB 3.0 port (has SS logo or blue colored inside). Try swapping cables at the Edison end–maybe one of them has the pins a little worn out. Poweroff and Power on your PC. Try another PC. If you don’t see these lines output by dmesg upon plugin, no other steps will work. You have to fix this first.
Type in your laptop
lsusb
you should see a line with
ID 0403:6001 Future Technology Devices International, Ltd FT232 USB-Serial (UART) IC
The red arrow points to the side of the “74” diode that comes right off the micro USB connector.
With 5.00 volt input, downstream of the diode measured 4.72 V with the Edison idling.
This voltage drop is expected due to the forward bias diode voltage drop.
Edison power measurement points
Under 100% of one core CPU load measured 4.98 V on the USB side, and 4.66 V on the Edison side of this diode while powering from the USB port on the Verbatim 97928.
The minuscule apparent 20mV voltage drop on the battery/USB side of the diode is likely to come from ohmic losses in the USB connector and cable.
Intel Edison alkaline battery life estimate is based on:
We estimate 10-12 hours of battery life on four AA alkaline batteries assuming continuous 100% CPU of one of the two CPU cores (other core idle).
Normally the Edison will be mostly resting, drawing perhaps 100 mW.
Thus with mixed use, I might expect up to 4-5 days of continuous mixed use operation on 4xAA batteries for the Intel Edison.
The Intel Edison power draw was measured while using the Mini Breakout Board.
Yocto 3.0 has PulseAudio, BlueMan, XDG, etc. running in the background.
This brings the idle current up 5 times as much as Yocto 2.1.
To help preserve battery, perhaps disable unneeded services.
Yocto 3.5:
Activity
Power (mW)
voltage
current (mA)
booting up (peak)
820
5.09
160
100-150% 1 CPU + Wifi
967
5.09
190
50-100% 1 CPU + Wifi (curl https)
820
5.09
160
5% 1 CPU + heavy disk write
561
5.10
110
idle
410
5.12
80
powered off (LED only adapter board)
< 51
5.12
< 0.01
Yocto 3.0
Activity
Power (mW)
voltage
current (mA)
booting up (peak)
944
4.97
190
using Wifi (opkg update)
803
5.02
160
idle
455
5.05
90
powered off (LED only adapter board)
< 51
5.12
< 0.01
Yocto 2.1
Activity
Power (mW)
voltage
current (mA)
booting up (peak)
984
8.2
120
using Wifi (opkg update)
680
8.5
80
typing text (using serial port)
346
8.65
40
idle
88
8.8
10
powered off (LED is on adapter board)
45
8.9
5
Benchmarks http://www.davidhunt.ie/raspberry-pi-beaglebone-black-intel-edison-benchmarked/
of Raspberry Pi vs. Beaglebone Black vs. Intel Edison.
The Intel Edison specifications show the idle power with Wifi as 35 mW, while we measure 88 mW.
Lkely sources for “high” power reading are the two bright green LEDs on the USB adapter board, and the switching power conversion from 9 V to 1.8 V.
Citadel is an easy to install groupware server.
Accessing features took a few seconds per click, and it didn’t seem that users would have the patience for Citadel on Raspberry Pi Zero.
The Raspberry Pi Zero W does quite adequately in this regard – you will feel just a bit of the CPU limitation when using many sessions or high Ethernet bandwidth.
The Raspberry Pi FM transmitter works splendidly – the program can be modified to transmit narrowband (~ 5kHz) FM on the 2 meter ham band, and for a wide variety of software defined radio tasks.
On the Intel Edison Arduino board, the J18 Arduino connector block TX/RX pins have the UART connected to /dev/ttyMFD1 in the default Yocto install.
Edison adapter board
GPIO voltage
Arduino
5 V
Mini-Breakout
1.8 V
The Mini-Breakout board Intel Edison has 1.8 V GPIO and can be damaged from connecting directly to 3.3 V or 5 V TTL logic.
You need a level shifter board to do the interface to non-1.8V logic from the Mini-Breakout board.
To receive a stream from Intel Edison UART from a serial device that constantly streams output like a GPS NMEA stream.
At the Edison shell prompt:
stty -F /dev/ttyMFD1 9600cat /dev/ttyMFD1
where 9600 is serial port device baudrate
Text streams to console from UART serial device on Edison.
To two-way TX/RX from Intel Edison UART install:
opkg install screen
Connect interactively to UART device from the Edison shell
screen /dev/ttyMFD1 9600
where 9600 is serial port device baudrate
MRAA + PySerial make using the Intel Edison serial port easy from Python.
Example: router with LAN IP address range 192.168.1.xxx.
The address discovery is faster if you know which port is open on your targeted device (host).
However, you can also discover the device if open port is unknown.
Unknown open port scan:
nmap -sn 192.168.1.* --open
will tell you some of the IP addresses that are active on that subnet.
Options:
-sn
check if pingable (ping scan, not port scan)
--open
only tell which hosts appear to be up
Many devices will hide themselves from this scan, but it’s the first thing I try for finding a new device that attached to the network, such as an IoT device that isn’t trying to hide itself.
Port known, IP address scan: port scanning is much faster when the open port is known.
Note in some rare cases, there is a firewall schedule or port knocking as additional security that could cause a port scan to fail.
Raspberry Pi port scan: assume known 192.168.1.xxx and that factory image has an SSH server on port 22.
Find the new Raspberry Pi IP address with
nmap -Pn -p 22 192.168.1.* --open
-Pn
nmap assumes each host is up
--open
only hosts with specified port open
non-nmap: scan IP address range with known open port: the pure Python program
findssh.py,
scans for servers with open ports in less than a second concurrently via
Python asyncio.