RC helicopter - improving maximum control range
Previously I observed 4x
increased range
from repairing the antenna in the RC car.
I was therefore curious what could be characterized and improved for RC helicopter maximum control range.
This is a $50 unit by Interactive Toys, FCC ID RSD-50800TX for the controller and RSD-50800RX for the helicopter.
It’s a 2.4 GHz controller with about 3 dBm EIRP.
The antennas are non-resonant.
The radio system operates under FCC Part 15.249(a), allowing 114 dBμV/m @ 3m radiation ~ +18.77 dBm ~ 75 mW EIRP peak.
The battery is 3.7 V 650 mAh, good for about 10-15 minutes of use.
The manual states up to 6 of these helicopters can be used within line-of-sight of each other.
Controller power-on: 33% duty cycle: 200 μs FSK(?) pulse, 600 μs period on 2406 MHz.
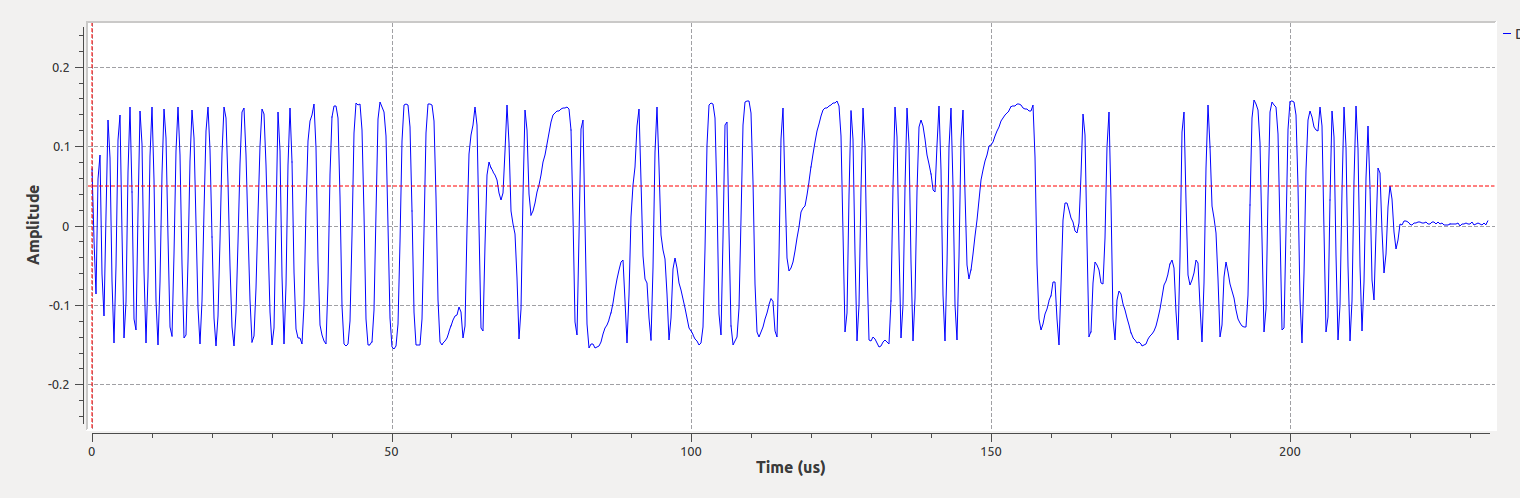
Paired waveform, 2408.9 MHz for RC helicopter
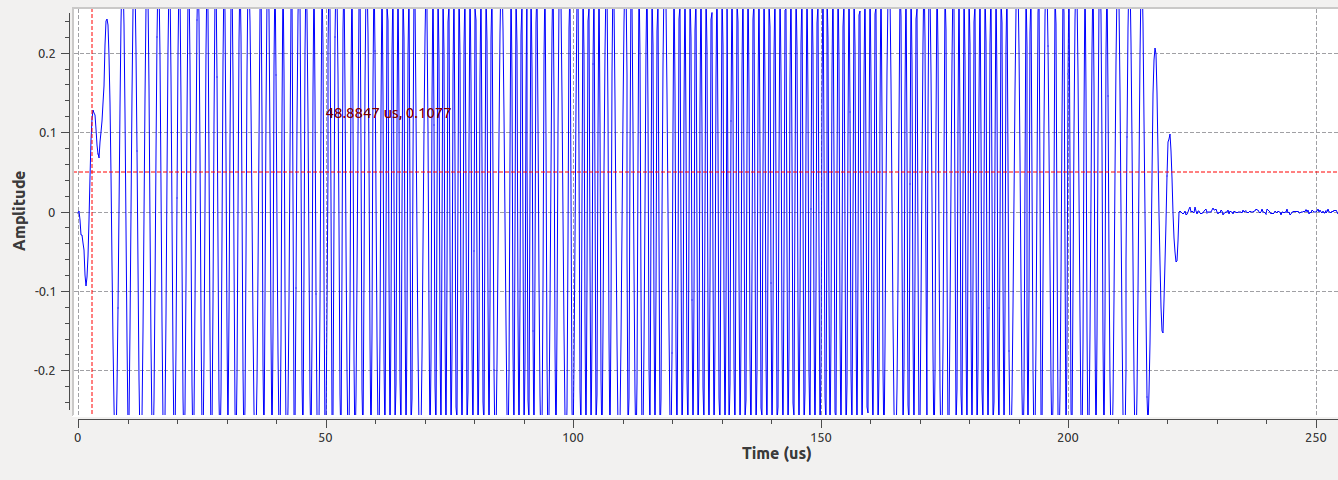
Pairing beacon for RC helicopter 2406 MHz
Power either controller or copter on first, within a second or so of both being turned on, they pair, and they go always to 2408.9 MHz, even if there is a strong WiFi signal on channel 1. The controller antenna is appalling. They take a Ruixing 2.4 GHz daughterboard, disregard its meander antenna and solder a 6.5 cm wire near the feedpoint of the meander antenna and slather the area in rubber cement. The maximum range of the RC helicopter could use some improvement, thus the experiment below.
Three things that expected to make a significant improvement (2x to 3x) in maximum RC helicopter control range:
- Trim about 2cm off of the controller antenna with a wire cutter
- Bend the Ruixing board about 0.5 cm away from the main PCB, a large groundplane
- The 3 cm copter antenna was bent over in a mess of other wires just like the RC car controller, which made such a significant reduction in range. I intend to glue the plastic I cut out back in to help protect the Li Ion battery. I didn’t put the antenna vertical for better coverage, and to avoid getting the antenna caught in the copter blades.
Observations: #1 and #2 made about a 4 dB increase in transmitter EIRP. From #3 expect a 6-10dB increase in copter transmitter EIRP (and in RX gain).
These devices test well under FCC power limits. From the test reports it seems the antennas were put in the ideal position. We have just restored the FCC certified performance.
Controllability problems (weak signal -> intermittent control) when more than about 30 meters slant range to the copter, which is too short for safe operations.
From Friis free space loss equation, to go from 30 m range to 100 m range should take 10.5 dB extra. Even 60 m from 30 m (6 dB change as doubling range makes 4x weaker by inverse square law) would be an improvement.