Solving problems of legacy Auroral video
Legacy auroral video acquisition has been plagued with several problems including
- camera sensitivity
- data storage
- video time synchronization
- software instability
An example of such a system was deployed last winter to Poker Flat Research Range. The results of this work won “Honorable Mention” at the CEDAR 2011 Workshop. A two camera system observed the aurora from Poker Flat Research Range (Chatanika, AK) and Ester, AK.
Notice the hardware synchronization connections on the camera are not being used. This makes the system reliant on the vagaries of software timing of the OS, which in Windows case can account for order 100 ms. When one wants 33 ms cadence video, this means such video will be roughly syntonized, but poorly synchronized.
Timing error due to non-hardware synchronization: error for a single frame, the error will accumulate in general due to error bias, quickly leading the cameras to be taking pictures at different times (no video frame overlap in time).
| Error source | Description | Error magnitude [s] |
|---|---|---|
| camera FPGA | Non-TCXO 100 ppm crystal timebase inside camera | 10-6 |
| PC time | NTP error | 10-3 |
| software trigger | Start time error due to SDK | 10-1 |
The software trigger error is not predictable and can reach up to 1/2 second. Aurora has apparent motion of kilometers per second, and so a camera designed for 10..100 m scale width observations needs to have timing error commensurate with the physical phenomenon. Hopes of a tomographic solution are dashed if the pictures are taken at times distant enough such that the feature of interest changes on timescale less than the error.
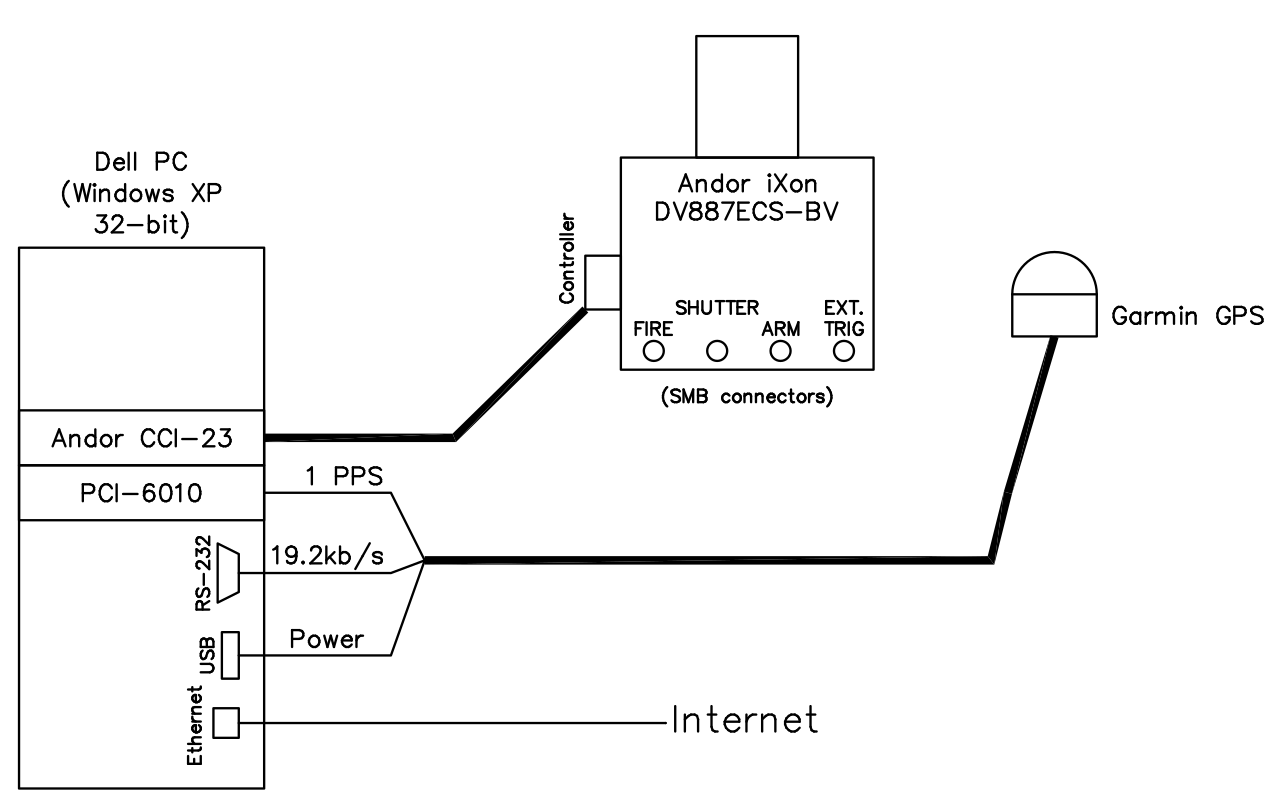
imager block diagram
Observational Solution for Auroral Tomography: the ill-conditioned, ill-posed nature of the high-resolution auroral tomography problem dictates attention to detail of all aspects of cross-site registration. We will have to ensure:
- images are accurately registered.
- Absolute and relative timing are synchronized to at least 2 orders of magnitude better than the frame cadence (< 1 % timing error)
- If the data writing becomes overwhelmed, the system should discard a bit of video and recover rather than stutter the recording.
Notes
Plant, G., Semeter, J., Marshall, R., Dahlgren, H., Goenka, C., and Hampton, D. (2011). A high-speed tomographic imaging system for studying dynamic aurora. In Instruments or Techniques for Ionospheric or Thermospheric Observation. CEDAR Workshop, Santa Fe, NM. ITIT-06.